11、进程有哪些调度算法?
进程调度就是确定某一个时刻CPU运行哪个进程,常见的进程调度算法有:先来先服务、短作业优先、优先级调度、时间片轮转、最短剩余时间优先。
- 先来先服务:非抢占式的调度算法,按照请求的顺序进行调度。有利于长作业,但不利于短作业,因为短作业必须一直等待前面的长作业执行完毕才能执行,而长作业又需要执行很长时间,造成了短作业等待时间过长。另外,对I/O密集型进程也不利,因为这种进程每次进行I/O操作之后又得重新排队。
- 短作业优先:非抢占式的调度算法,按估计运行时间最短的顺序进行调度。长作业有可能会饿死,处于一直等待短作业执行完毕的状态。因为如果一直有短作业到来,那么长作业永远得不到调度。
- 优先级调度:为每个进程分配一个优先级,按优先级进行调度。为了防止低优先级的进程永远等不到调度,可以随着时间的推移增加等待进程的优先级。
- 时间片轮转:将所有就绪进程按 先来先服务的原则排成一个队列,每次调度时,把 CPU 时间分配给队首进程,该进程可以执行一个时间片。当时间片用完时,由计时器发出时钟中断,调度程序便停止该进程的执行,并将它送往就绪队列的末尾,同时继续把 CPU 时间分配给队首的进程。时间片轮转算法的效率和时间片的大小有很大关系:因为进程切换都要保存进程的信息并且载入新进程的信息,如果时间片太小,会导致进程切换得太频繁,在进程切换上就会花过多时间。 而如果时间片过长,那么实时性就不能得到保证。
- 最短剩余时间优先:最短作业优先的抢占式版本,按剩余运行时间的顺序进行调度。 当一个新的作业到达时,其整个运行时间与当前进程的剩余时间作比较。如果新的进程需要的时间更少,则挂起当前进程,运行新的进程。否则新的进程等待。
12、进程间通信有哪些方式?
进程间通信方式有:管道、消息队列、共享内存、信号量、信号、Socket。
优缺点:
- 管道:简单;效率低,容量有限;
- 消息队列:不及时,写入和读取需要用户态、内核态拷贝。
- 共享内存区:能够很容易控制容量,速度快,但需要注意不同进程的同步问题。
- 信号量:不能传递复杂消息,一般用来实现进程间的同步;
- 信号:它是进程间通信的唯一异步机制。
- Socket:用于不同主机进程间的通信。
(1)管道
管道可以理解成不同进程之间的对白,一方发声,一方接收,声音的介质可是是空气或者电缆,进程之间就可以通过管道,所谓的管道就是内核中的一串缓存,从管道的一端写入数据,就是缓存在了内核里,另一端读取,也是从内核中读取这段数据。
管道可以分为两类:匿名管道和命名管道。匿名管道是单向的,只能在有亲缘关系的进程间通信;命名管道是双向的,可以实现本机任意两个进程通信。
(2)信号
信号可以理解成一种电报,发送方发送内容,指定接收进程,然后发出特定的软件中断,操作系统接到中断请求后,找到接收进程,通知接收进程处理信号。
比如kill -9 1050就表示给PID为1050的进程发送SIGKIL信号。Linux系统中常用信号:
① SIGHUP:用户从终端注销,所有已启动进程都将收到该进程。系统缺省状态下对该信号的处理是终止进程。
② SIGINT:程序终止信号。程序运行过程中,按Ctrl+C键将产生该信号。
③ SIGQUIT:程序退出信号。程序运行过程中,按Ctrl+\键将产生该信号。
④ SIGBUS和SIGSEGV:进程访问非法地址。
⑤ SIGFPE:运算中出现致命错误,如除零操作、数据溢出等。
⑥ SIGKILL:用户终止进程执行信号。shell下执行kill -9发送该信号。
⑦ SIGTERM:结束进程信号。shell下执行kill 进程pid发送该信号。
⑧ SIGALRM:定时器信号。
⑨ SIGCLD:子进程退出信号。如果其父进程没有忽略该信号也没有处理该信号,则子进程退出后将形成僵尸进程。
(3)消息队列
消息队列就是保存在内核中的消息链表,包括Posix消息队列和System V消息队列。有足够权限的进程可以向队列中添加消息,被赋予读权限的进程则可以读走队列中的消息。消息队列克服了信号承载信息量少,管道只能承载无格式字节流以及缓冲区大小受限等缺点。
(4)共享内存
共享内存的机制,就是拿出⼀块虚拟地址空间来,映射到相同的物理内存中。这样这个进程写⼊的东西,另外的进程⻢上就能看到。共享内存是最快的 IPC 方式,它是针对其他进程间通信方式运行效率低而专门设计的。它往往与其他通信机制,如信号量,配合使用,来实现进程间的同步和通信。
(5)信号量
信号量我们可以理解成红绿灯,红灯行,绿灯停。它本质上是一个整数计数器,可以用来控制多个进程对共享资源的访问。它常作为一种锁机制,防止某进程正在访问共享资源时,其他进程也访问该资源。因此,主要作为进程间以及同一进程内不同线程之间的同步手段。
信号量表示资源的数量,控制信号量的⽅式有两种原⼦操作:
- ⼀个是 P 操作,这个操作会把信号量减去 1,相减后如果信号量 < 0,则表明资源已被占⽤,进程需阻塞等待;相减后如果信号量 >= 0,则表明还有资源可使⽤,进程可正常继续执⾏。
- 另⼀个是 V 操作,这个操作会把信号量加上 1,相加后如果信号量 <= 0,则表明当前有阻塞中的进程,于是会将该进程唤醒运⾏;相加后如果信号量 > 0,则表明当前没有阻塞中的进程;
P 操作是⽤在进⼊共享资源之前,V 操作是⽤在离开共享资源之后,这两个操作是必须成对出现的。
(6)Socket
与其他通信机制不同的是,它可用于不同机器间的进程通信。
13、进程和线程的联系和区别?
线程和进程的联系:线程是进程当中的⼀条执⾏流程。
同⼀个进程内多个线程之间可以共享代码段、数据段、打开的⽂件等资源,但每个线程各⾃都有⼀套独⽴的寄存器和栈,这样可以确保线程的控制流是相对独⽴的。
线程与进程的⽐较如下:
- 调度:进程是资源(包括内存、打开的⽂件等)分配的单位,线程是 CPU 调度的单位;
- 资源:进程拥有⼀个完整的资源平台,⽽线程只独享必不可少的资源,如寄存器和栈;
- 拥有资源:线程同样具有就绪、阻塞、执⾏三种基本状态,同样具有状态之间的转换关系;
- 系统开销:线程能减少并发执⾏的时间和空间开销——创建或撤销进程时,系统都要为之分配或回收系统资源,如内存空间,I/O设备等,OS所付出的开销显著大于在创建或撤销线程时的开销,进程切换的开销也远大于线程切换的开销。
14、线程上下文切换了解吗?
这还得看线程是不是属于同⼀个进程:
当两个线程不是属于同⼀个进程,则切换的过程就跟进程上下⽂切换⼀样;
当两个线程是属于同⼀个进程,因为虚拟内存是共享的,所以在切换时,虚拟内存这些资源就保持不动,只需要切换线程的私有数据、寄存器等不共享的数据;
所以,线程的上下⽂切换相⽐进程,开销要⼩很多。
15、线程有哪些实现方式?
主要有三种线程的实现⽅式:
- 内核态线程实现:在内核空间实现的线程,由内核直接管理直接管理线程。
- ⽤户态线程实现:在⽤户空间实现线程,不需要内核的参与,内核对线程无感知。
- 混合线程实现:现代操作系统基本都是将两种方式结合起来使用。用户态的执行系统负责进程内部线程在非阻塞时的切换;内核态的操作系统负责阻塞线程的切换。即我们同时实现内核态和用户态线程管理。其中内核态线程数量较少,而用户态线程数量较多。每个内核态线程可以服务一个或多个用户态线程。
16、线程间如何同步?
同步解决的多线程操作共享资源的问题,目的是不管线程之间的执行如何穿插,最后的结果都是正确的。
我们前面知道线程和进程的关系:线程是进程当中的⼀条执⾏流程。所以说下面的一些同步机制不止针对线程,同样也可以针对进程。
临界区:我们把对共享资源访问的程序片段称为临界区,我们希望这段代码是互斥的,保证在某时刻只能被一个线程执行,也就是说一个线程在临界区执行时,其它线程应该被阻止进入临界区。
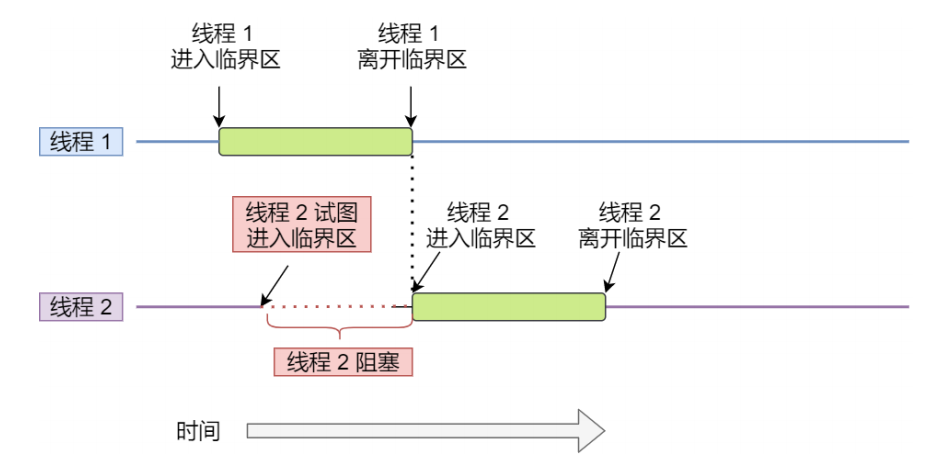
临界区不仅针对线程,同样针对进程。临界区同步的一些实现方式:
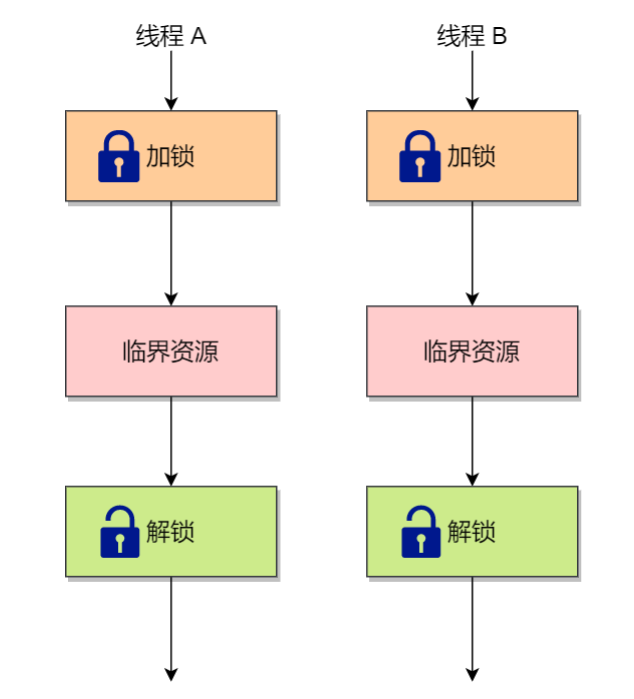
(1)锁
使⽤加锁操作和解锁操作可以解决并发线程/进程的互斥问题。
任何想进⼊临界区的线程,必须先执⾏加锁操作。若加锁操作顺利通过,则线程可进⼊临界区;在完成对临界资源的访问后再执⾏解锁操作,以释放该临界资源。
加锁和解锁锁住的是什么呢?可以是临界区对象,也可以只是一个简单的互斥量,例如互斥量是0无锁,1表示加锁。
根据锁的实现不同,可以分为忙等待锁和和⽆忙等待锁。
忙等待锁和就是加锁失败的线程,会不断尝试获取锁,也被称为自旋锁,它会一直占用CPU。
⽆忙等待锁就是加锁失败的线程,会进入阻塞状态,放弃CPU,等待被调度。
(2)信号量
信号量是操作系统提供的⼀种协调共享资源访问的⽅法。
通常信号量表示资源的数量,对应的变量是⼀个整型( sem )变量。
另外,还有两个原⼦操作的系统调⽤函数来控制信号量的,分别是:
P 操作:将 sem 减 1 ,相减后,如果 sem < 0 ,则进程/线程进⼊阻塞等待,否则继续,表明 P操作可能会阻塞;
V 操作:将 sem 加 1 ,相加后,如果 sem <= 0 ,唤醒⼀个等待中的进程/线程,表明 V 操作不会阻塞;
P 操作是⽤在进⼊临界区之前,V 操作是⽤在离开临界区之后,这两个操作是必须成对出现的。
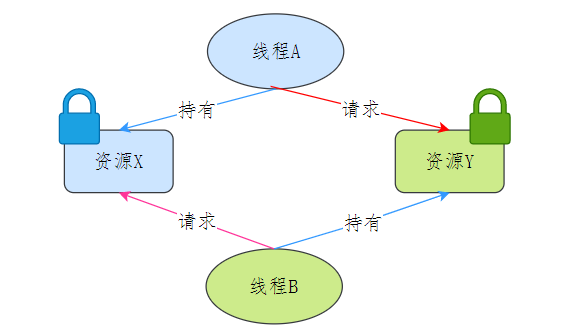
17、什么是死锁?
在两个或者多个并发线程中,如果每个线程持有某种资源,而又等待其它线程释放它或它们现在保持着的资源,在未改变这种状态之前都不能向前推进,称这一组线程产生了死锁。通俗的讲就是两个或多个线程无限期的阻塞、相互等待的一种状态。
18、死锁产生有哪些条件?
死锁产生需要同时满足四个条件:
- 互斥条件:指线程对己经获取到的资源进行它性使用,即该资源同时只由一个线程占用。如果此时还有其它线程请求获取获取该资源,则请求者只能等待,直至占有资源的线程释放该资源。
- 请求并持有条件:指一个 线程己经持有了至少一个资源,但又提出了新的资源请求,而新资源己被其它线程占有,所以当前线程会被阻塞,但阻塞 的同时并不释放自己已经获取的资源。
- 不可剥夺条件:指线程获取到的资源在自己使用完之前不能被其它线程抢占,只有在自己使用完毕后才由自己释放该资源。
- 环路等待条件:指在发生死锁时,必然存在一个线程——资源的环形链,即线程集合 {T0,T1,T2,…… ,Tn} 中 T0 正在等待一 T1 占用的资源,Tl1正在等待 T2用的资源,…… Tn 在等待己被 T0占用的资源。
19、如何避免死锁呢?
产⽣死锁的有四个必要条件:互斥条件、持有并等待条件、不可剥夺条件、环路等待条件。
避免死锁,破坏其中的一个就可以。
消除互斥条件
这个是没法实现,因为很多资源就是只能被一个线程占用,例如锁。
消除请求并持有条件
消除这个条件的办法很简单,就是一个线程一次请求其所需要的所有资源。
消除不可剥夺条件
占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源,这样不可剥夺这个条件就破坏掉了。
消除环路等待条件
可以靠按序申请资源来预防。所谓按序申请,是指资源是有线性顺序的,申请的时候可以先申请资源序号小的,再申请资源序号大的,这样线性化后就不存在环路了。
20、活锁和饥饿锁了解吗?
饥饿锁:
饥饿锁,这个饥饿指的是资源饥饿,某个线程一直等不到它所需要的资源,从而无法向前推进,就像一个人因为饥饿无法成长。
活锁:
在活锁状态下,处于活锁线程组里的线程状态可以改变,但是整个活锁组的线程无法推进。
活锁可以用两个人过一条很窄的小桥来比喻:为了让对方先过,两个人都往旁边让,但两个人总是让到同一边。这样,虽然两个人的状态一直在变化,但却都无法往前推进。